Qwen-Robot Suite:阿里千问开源具身机器人模型套件,一体化实现操作导航与物理推演
Qwen-Robot Suite 是阿里巴巴通义千问团队2026年6月16日正式发布的全套具身智能机器人基础模型套件,也是千问大模型体系首款覆盖机器人操作、移动、物理推演全链路的一体化...

Qwen-Robot Suite 是阿里巴巴通义千问团队2026年6月16日正式发布的全套具身智能机器人基础模型套件,也是千问大模型体系首款覆盖机器人操作、移动、物理推演全链路的一体化...
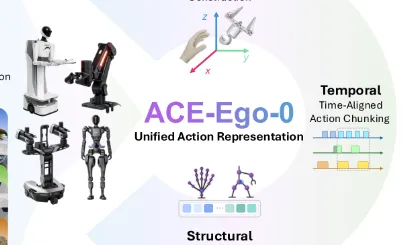
ACE-Ego-0 是由大晓机器人(ACERobotics-VLA)联合香港中文大学MMLab、清华大学、上海交通大学联合研发并开源的以人为中心视觉-语言-动作(VLA)具身机器人基础框架。

Kairos-HomeWorld是大晓机器人联合港中文MMLab、深圳河套学院开源的全球首个全屋三维可交互世界模型,采用四阶段分层生成架构,可通过文本指令生成符合中国家庭特征的全屋3...

Qwen‑VLA是阿里通义千问推出的开源通用视觉‑语言‑动作统一具身智能模型,基于Qwen多模态基座构建,通过四阶段训练实现视觉感知、语言理解与连续动作生成的端到端融合,单...
Wall-X 是由 X-Square-Robot 团队在 GitHub 开源的一套端到端具身智能机器人基础模型工程体系,核心依托自研 WALL-OSS 模型,搭建起从数据采集、模型训练、算法推理到真机部...

HY-Embodied-0.5-X 是腾讯混元Hunyuan团队联合腾讯Robotics X实验室共同研发并正式开源的具身多模态基础大模型,项目完整托管于GitHub开源社区,全程开源开放,面向全球开发...

GO-2(Genie Operator-2)是智元机器人推出的新一代具身智能基座大模型,以统一架构融合逻辑推理与高精度运动控制,首创动作思维链与异步双系统,弥合语义意图与物理动作的...

Matrix-Game 3.0是昆仑万维旗下天工AI研发的工业级实时流式交互式世界模型,是首个实现长时序一致性、720p高分辨率、实时交互三者统一的开源世界模型。该模型基于扩散Trans...

GigaWorld-1是国内科技企业极佳视界自主研发的新一代动作控制类具身世界模型(AC-WM),聚焦物理世界AI交互与智能体动作模拟,是面向机器人、自动化设备、物理仿真场景打造...

Kairos 3.0(开悟世界模型3.0)是大晓机器人开源的具身原生世界基础模型,以物理规律与因果逻辑为核心,采用线性时间复杂度DiT架构,实现“多模态理解—生成—预测”一体化...

Ctrl-World 是由清华大学与斯坦福大学联合研发、基于 PyTorch 实现的可控生成式世界模型,专为机器人操控任务设计。它以 Stable Video Diffusion 为基座,通过动作条件驱动...

RynnBrain是阿里巴巴达摩院开源的具身基础模型,以物理现实为锚点,面向机器人操作、视觉-语言导航、复杂任务规划等具身智能场景设计,具备时空定位、物理空间交错推理、物...

LingBot-VA是蚂蚁灵波开源的一款面向通用机器人控制的因果视频-动作世界建模框架,核心基于自回归视频预测与逆向动力学推理,打破传统机器人“观察-反应”的固有模式,通过...

Being-H 是由BeingBeyond 团队开源的以人为中心的跨体化视觉 - 语言 - 动作(VLA)基础模型,核心聚焦于解决机器人学习中 “形态异构、数据稀缺、泛化能力弱” 的行业痛点,...

Spirit-v1.5是由千寻智能(Spirit AI)研发并开源的端到端视觉-语言-动作(VLA)具身智能基础模型,该模型在RoboChallenge Table30基准测试中以66.09分的综合得分和50.33%的...